Machines - our partners rather than replacements?
Master Researcher, Artificial Intelligence
Associate Professor
Post doc researcher
Master Researcher, Artificial Intelligence
Associate Professor
Post doc researcher
Master Researcher, Artificial Intelligence
Associate Professor
Post doc researcher
The use of cognitive architecture technology to manage cyber-physical systems is the ideal partnership for building up the infrastructure of smart sustainable cities.
Cognitive architectures integrate multiple machine learning techniques to support learning, encoding, and using knowledge to perform tasks, decision making, and intelligent interactions between humans and automatic devices. This grants machines more human-like behavior and encourages more natural integration with the environment.
What if machines were able to enter into dialogue with us, listen to our opinions, and then provide alternatives while we are making decisions? What if, instead of making decisions for us, they were able to help us while we are making a difficult decision? Could they be seen as partners rather than our replacements?
We believe they could, as long as we were able to delegate to them the kinds of services we feel are too boring for a human being to perform and, instead of being instructed step-by-step on what to do, they were able to learn by observation and trial and error.
Machines have many qualities which cannot be overlooked. They can be extremely precise and perform repetitive behaviors without distraction. Equipped with the proper optimization algorithms they are able to calculate how to spend the minimum effort to perform tasks, minimizing costs and maximizing performance. In this sense, they are fundamental to manage and control many assets which are available in the public environment of a city.
However, current systems are becoming more and more complex, being composed of many loosely coupled heterogeneous parts, showing dynamic and nonlinear behavior, and tending to present unexpected emergent properties. More than that, machines are not isolated and self-contained anymore. They are connected to the Internet. They are interconnected with other machines and with humans operating smart devices like smartphones and intelligent human-computer interfaces requiring vision capabilities and speech understanding. Together, we are converging to a system-of-systems scenario, which is far more complex than we might have expected at the beginning. Standard machines and algorithms are already on the verge of what they can do in this scenario.
Each of these machine-controlled assets linked together by the Internet is what we call a cyber-physical system (CPS). These are physical systems with embedded software which expand the capabilities of the physical world through computation, communication and control. In CPS, the physical and computational components are highly interconnected and integrated, which poses yet another challenge to those intending to control them. It is important to understand the kinds of problems that emerge while many CPSs need to interact with each other, at the same time they are performing their local services.
A popular approach nowadays to implement the level of automation required to deal with such scenarios is to use machine-intelligence techniques. Machine intelligence (MI) is a collection of computational methodologies, approaches, tools and techniques that are intended to be used to model and solve complex real-world problems by automating functions which require intelligence when performed by humans.
However, different problems and applications require different machine-intelligence techniques and tools. And there are many of them!
Real-world applications are usually composed of many sub-problems. For example, one CPS application may require capabilities for pattern recognition, raw image processing, categorization, reasoning, decision-making, and natural language communications, while also requiring planning, control of robotic devices and interaction with other systems. Therefore, for dealing with real world problems, many MI techniques are often required to be employed in an integrated and synergistic manner. Hence, if our intention is to manage complex cyber-physical systems, we are left with the two following challenges:
- How to model and control complex systems composed of many loosely coupled heterogeneous parts that are expected to interact with each other;
- How to integrate machine intelligence techniques to work synergistically within the same framework.
The key to addressing such challenges is developing the concept of cognitive management. This idea goes beyond the use of MI techniques in an isolated way addressing particular problems. We need an integrated solution which is more human-like, with cognitive abilities to perceive the world and perform abstractions on these percepts.
We need a system able to remember perceived scenes, and to employ trial and error learning while interacting with the world. We need systems which can plan ahead and consider multiple possible solutions before deciding on a course of action. We need systems which would interact naturally with humans, exchanging ideas and plans and executing those plans. This is what is behind the notion of a cognitive manager.
A cognitive manager does not simply manage and operate a CPS, but is equipped with cognitive abilities for interacting with its surroundings and with other cognitive managers (and humans). It is able to optimize its local controlled environment, but at the same time it is made to perform local sub-optimizations in order to collaborate with other cognitive managers aiming to achieve a higher collective goal.
The question now is how do we build such cognitive managers?
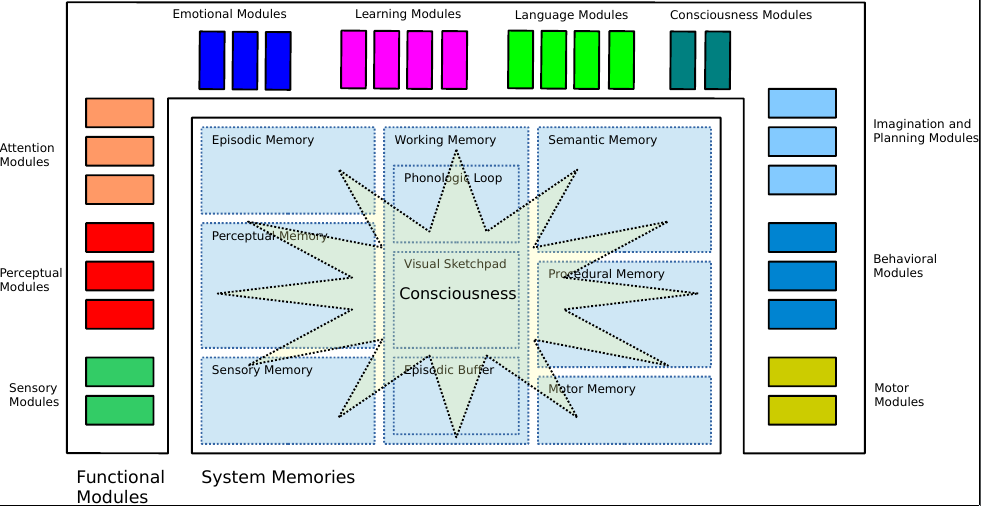
And this is where the technology of cognitive architecture comes to the rescue. Cognitive architecture comprises computational frameworks employing cognitive models, such as models of how cognition is performed in the mind of humans and other animals. As you can see below in the figure “Components of a Cognitive Architecture”, adapted from the Cognitive Systems Toolkit, these frameworks are usually composed of modules named after cognitive functions we observe to happen in our own brains, such as working memory, learning, action selection and planning:
These are powerful frameworks for designing intelligent computational agents, and can be used for modeling multi-agent interaction in the complex control scenarios, one possible way of addressing challenges.
Moreover, the human mind is composed of many different cognitive functions which act in synergy to produce high level cognition to solve problems. When a cognitive architecture is developed as software, its cognitive functions are often implemented using very different machine intelligence techniques, e.g. planning can be implemented as a rule-based system with its semantic memory consisting of artificial neural networks, and they are supposed to interact with each other to help the agent accomplish its goals.
Therefore, besides being a framework for multi-agent systems modeling, cognitive architectures can also serve as guidelines for integrating different machine intelligence components into a single framework in order to create intelligent agents capable of adaptive decision-making and learning in CPS scenarios.
Some of the most popular cognitive architectures are SOAR, ACT-R, CLARION and LIDA, but there is a whole research community addressing this research topic. These architectures approach different aspects of cognition, such as emotions, attention, memory, consciousness and language, and each with advantages and shortcomings when compared to each other.
Ericsson Research is addressing the challenges in cognitive control of cyber-physical systems cooperating along with the Cognitive Systems Group at the University of Campinas. In an earlier work published at Elsevier’s Journal of Biologically Inspired Cognitive Architectures - “A Machine Consciousness Approach to Urban Traffic Control” - a distributed cognitive architecture based on global workspace theory was used to improve the overall mean travel time of vehicles flowing through a simulated urban network.
The authors used the Cognitive Systems Toolkit (CST) an open source Java-based toolkit to allow the construction of Cognitive Architectures, which was published at Elsevier “The cognitive systems toolkit and the CST reference cognitive architecture” and is available at http://cst.fee.unicamp.br/.