You need to see our dancing hexapod demo from MWC
Experienced Researcher
Experienced Researcher
Experienced Researcher
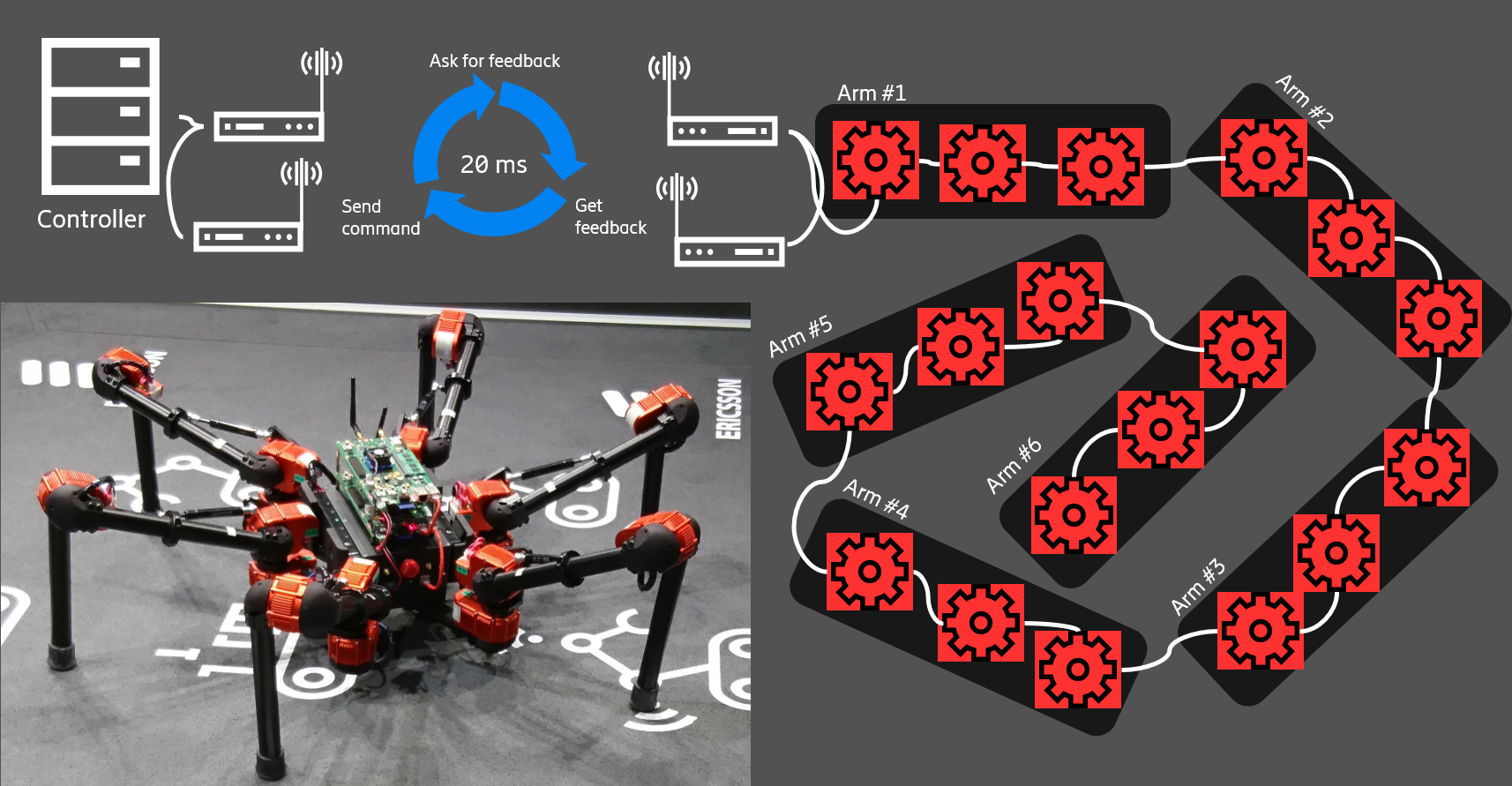
Our spider robot isn't actually a spider; it's a hexapod consisting of six robot arms connected in the cloud. Processing for each limb is independently controlled which makes it super flexible to deploy in industrial contexts.
Our ambition for this demo was to showcase the benefits of our technologies in industrial robotics. And to do so in an eye-catching way. We selected the spider robot demo because it overcomes a wide spectrum of the challenges that arise in an Industry 4.0 robot cell such as servo control, robot collaboration, etc.
We implemented a feature that allows to emulate different latencies – to showcase the need for the low latencies 5G brings.
During preparations for MWC in January we came upon another idea to enhance our robot demo and make it even more eye-catching by making it dance. With 5G-like-latencies, the hexapod got some moves! At higher latencies it starts to get quite shaky.
For the dancing part we needed music to dance to. Szabolcs Malomsoky from Ericsson Research composed some music to use during the event demo. So, it was a great group collaborative effort. And all our work paid off!
The results had attendees bopping and smiling. In the end, I think our creativity left attendees with a lasting and fun memory of the Ericsson hall.
Technically we advertise and demonstrate the infrastructure shift from local dedicated robot processing to a cloud enabled processing through the use 5G wireless communication – for greater flexibility. The robot illustrates flexibility in multiple ways – it is built from modular servos and is also as flexible as it is mobile – again enabled through 5G. Plus, the well-known flexibility a cloud offers over local processing. You can find more details on our vision of 5G for industrial robotics in our previous blog post.
But back to the demo. In our setup the hexapod was completely controlled from an edge cloud (implemented in a local computer) that is connected to the robot using our 5G low-latency radio prototypes. There we use a semi-persistent resource assignment on a time-scheduled transmit scheme to minimize latencies and adopt a feature from Time Sensitive Networking (TSN) for redundant communication channels as it is common in industrial networks to improve reliability.
This gives a latency of below 5 ms roundtrip, with a sufficient high reliability. As I already mentioned, the hexapod is made of individual servos – 18 in total – each individually controlled with a 20 ms control loop. (See the illustration below to learn more). The servos are daisy-chained and each one is run by its own 20 ms loop. A stable walk (or dance) is possible through coordinated control of each servo individually.
As one further feature of the demo, we were able to introduce an artificial latency, or basically a jitter (a variable latency) into the control application to illustrate, how the hexapod's movement is affected by that.
It starts to get quite jiggly, if the control loop for each servo stops working as expected. You can just imagine it as an unpredictable mismatch between a new command based on outdated feedback and the actual status of each servo.
For demo purposes a relatively high jitter of up to 100 ms is required to have a good visible effect – obviously this is a lot, compared to actual industrial requirements. In realistic industrial robot cells, the latency and jitter demands reside far below that. This is essential to understand and comes for two reasons: at first, industrial robots are precise tools, a deviation from a planned trajectory needs to be kept to a minimum and below that what would be noticeable by the human eye and second, due to safety reasons – the upper bound of the network delay directly contributes to the stop time of the robot in an intrusion scenario. Important to keep in mind, after all nobody wants to get hit by a robot arm...
Post-event examination
5G and edge cloud computing can be a powerful solution for the manufacturing sector, and other industries. I think the demo worked well at illustrating the importance of low latencies for industrial automation and industrial robotics specifically. Adding latency to the control loops on demand was a very good tool for that. We were really pleased by the positive visitor-feedback and the vast majority were as excited as we are about smart manufacturing and agree on the technological benefits of 5G and cloud computation.


The hexapod team: Norbert Reider, Sándor Rácz, Hubertus Andreas Munz and Gábor Németh.
As our research around 5G for industrial robotics progresses continuously, obviously we will also enhance our hexapod demo – for us TSN is an important topic and we will continue to investigate features that make a smooth interworking between 5G and TSN possible.
Our next demonstration will be at Hannover Messe in April – if you planned to go to Hannover as well, you are very welcome to come to our booth. If not, you should think about it, as it is the major event for the future of manufacturing – and 5G will be a part of it.
Read more about our research on 5G evolution and beyond and edge computing.