3GPP GNSS positioning and integrity: The latest trials and developments
Expert in RAN Automation and Positioning
Master Researcher, Networks
Expert in RAN Automation and Positioning
Master Researcher, Networks
Expert in RAN Automation and Positioning
Master Researcher, Networks
GNSS (Global Navigation Satellite System) positioning refers to the use of time-of-arrival measurements from multiple satellite signals to establish distance estimates to the satellites that enable all types of mobile devices to position themselves. The most efficient way to compensate for inevitable errors in the distance estimates provided by the satellites is with the help of data from terrestrial GNSS reference stations at known locations. Such data is processed in order to provide assistance data suitable for each device in consideration of its specific situation. The challenge when bringing an enabler like this to mass market is to ensure interoperability and scalability.

Ericsson precise positioning anytime anywhere
The role of 3GPP
While interoperable, scalable mobile broadband is generally taken for granted today, it’s important to remember that the specifications that enabled mobile broadband to become interoperable and scalable were the result of many years of work in 3GPP. Its work to create an open and interoperable representation of assistance data for high-precision GNSS began in 2017 and continues to this day.
Already in Release 15 (Rel-15), 3GPP started to define an open, interoperable and scalable solution for high-precision GNSS. By Release 16 (Rel-16), the scope was expanded to include a complete set of assistance data representations with the ability to address high-mobility use cases. Today, the recently completed Release 17 (Rel-17) specifies the use of positioning integrity to ensure that use cases can properly assess trust and availability of reliable positioning in order to avoid situations that could lead to injury or other negative consequences due to inaccurate positioning.
3GPP’s path toward scalable high-precision GNSS positioning depends on a few key steps, including GNSS correction data generation scalability and cellular broadcast migration. Because GNSS correction generation is per region, independent of the number of users in the region, as opposed to per user, users who are in the same vicinity will receive the same generated data. The data generation effort scales with the size of the region but is independent of the number of users in the region or market.
To ensure full scalability with the same transmission of data shared by all devices in the same cell coverage area, the distribution of high-precision GNSS assistance data will need to migrate from unicast (as it is today) to cellular broadcast.
The next step is to ensure that the devices can properly assess the positioning uncertainty and relate it to safety margins to ensure trust by enabling devices to indicate when reliable positioning is available or not available. This is known as positioning integrity.
Why GNSS integrity is necessary
GNSS integrity is defined as the measure of trust that can be placed in the correctness of the information supplied by the navigation system. It is related to the ability of the system to provide timely warnings to users when the system should not be used by safety-critical applications. The concept originated in the aviation industry to address the dangers that can arise when factors such as limited satellite visibility, multipath effect, interference and foliage attenuation cause a degradation of GNSS positioning performance.
When GNSS integrity is deemed to be sufficient (reliable and trustworthy, no residual error), the application using the positioning information can operate according to its standard operating procedures and in accordance with application safety requirements. When the positioning integrity is deemed to be insufficient (large residual error), the application should take pre-defined precautionary actions to prevent negative outcomes.
To be more specific, an application with GNSS integrity functionality can configure three requirement attributes that enable integrity assessments based on information about the position error distribution:
- Alert Limit (AL) – the maximum position error allowed by the application.
- Integrity Risk (IR) – the probability that the position error is larger than the alert limit without an alarm being triggered.
- Time To Alert (TTA) – the amount of time during which the position error can be higher than the alert limit before an alarm is triggered.
The position estimating entity gathers all information about the positioning errors and compares it to the integrity risk to determine the Protection Level (PL) – the distance within which the true position is contained with a probability of (1-IR). Figure 1 illustrates how all information about the positioning error distribution is used to form a position error CDF, which provides the PL corresponding to the configured IR. When PL has been above AL for TTA, an alarm is issued, declaring that reliable position estimates are not available to the application.
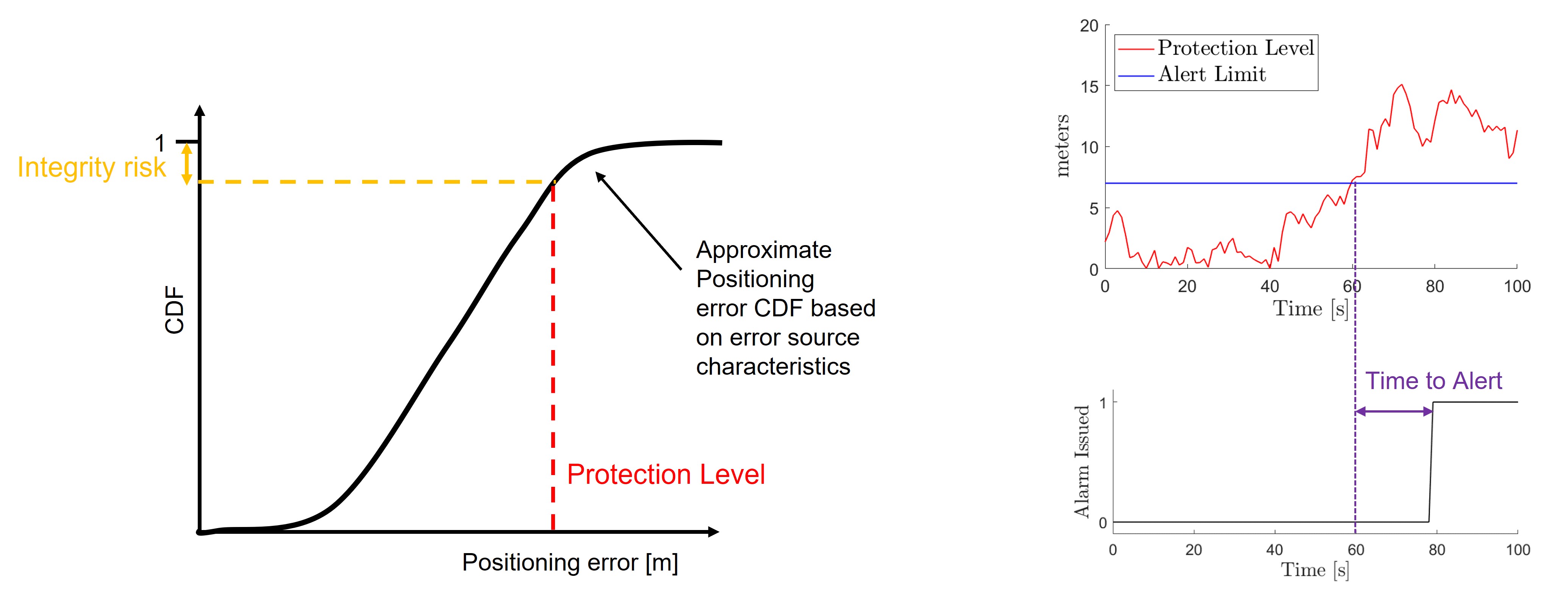
Figure 1. Integrity fundamentals
GNSS integrity use cases
In the 5G era, GNSS integrity has expanded to include other transportation fields such as rail and maritime, unmanned autonomous vehicles (drones), autonomous driving and vehicle-to-anything (V2X) to minimize safety hazards, accidents and erroneous legal decisions that involve liabilities. It is also essential for other mission-critical applications where positioning errors could cause harm, including emergency services, e-health and many industrial IoT scenarios. Different use cases will provide different integrity requirements in terms of IR, AL and TTA.
In short, the highest possible degree of certainty about positioning is needed for GNSS-based applications in which errors can lead to serious consequences. These use cases require GNSS integrity, which is achieved through careful consideration of aspects such as reliability, availability and confidence about accuracy.
High-precision GNSS in 3GPP Rel-15 and Rel-16
Rel-15 and Rel-16 have already enabled a major leap forward in supporting open, interoperable and scalable high-accuracy GNSS. The GNSS accuracy improvement is from approximately three to twenty meters to less than ten centimeters. Two different GNSS correction data representations are defined: observation state representation (OSR) and state space representation (SSR). The first phases of OSR and SSR were standardized in Rel-15 and SSR phase two was standardized in Rel-16.
Figure 2 illustrates the main scope of the two representations (OSR and SSR). The devices are associated to the most appropriate OSR non-physical GNSS reference station or SSR correction point set by its associated cell ID.
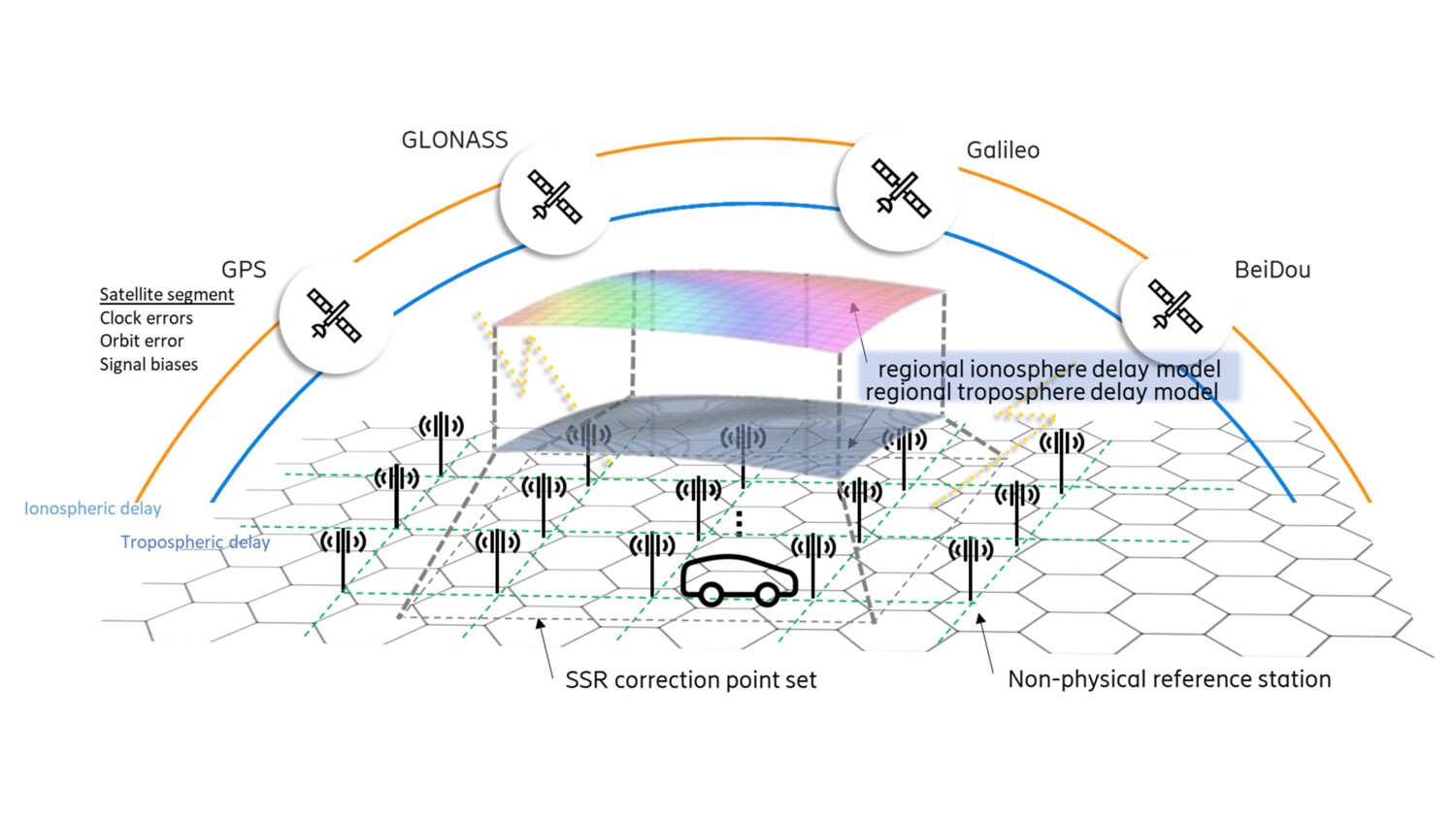
Figure 2. 3GPP OSR and SSR
OSR means that the GNSS correction data is represented by accurate GNSS satellite signals observations associated to a precisely defined location. The observations can be from a physical GNSS reference station, but more typical is that the GNSS corrections provider interpolates observations from multiple physical GNSS reference stations to a grid of non-physical GNSS reference stations.
SSR is realized by estimated error contributions, and the representation captures the satellite clock errors, the satellite orbit errors compared to the predicted orbits, signal biases between different signals from the same satellite and atmospheric delays. The atmospheric delays are represented for a spatial segment – an SSR correction point set. The ionospheric delay contribution is due to the Total Electron Content (TEC) in the ionosphere, through which the satellite signals propagate. Since the propagation is a slant path through the ionosphere, the SSR connections model the Slant Total Electron Content (STEC) per satellite as an interpolation formula. The formula and residuals over a set of spatial points in the spatial segment form the ionospheric corrects over the SSR correction point set. Moreover, the delay in the troposphere can also be represented over the SSR correction point set.
With the help of an LTE or 5G network, Rel-15/16 representation of GNSS corrections can be distributed as assistance data to the devices, and can be combined with other cellular network enablers such as:
- Periodic reporting of device position estimates to the location server for exposure to application functions.
- Network-based positioning as an independent validation of the GNSS position.
- Hybrid positioning with GNSS and other Radio Access Network (RAT)-independent positioning methods and RAT-dependent positioning such as 5G positioning.
The assistance data distribution can be via unicast or broadcast, where unicast enables flexibility, scalability and prompt entry to the market, while broadcast enables a migration path towards full scalability.
Positioning integrity in 3GPP Rel-17
The 3GPP Rel-17 work item on NR positioning enhancements (zip downloadable here) was supported by 35 companies, which indicates that there is broad interest, support and understanding behind the work. The positioning integrity functionality that has been introduced enables devices to:
- Assess the correctness of information and expected position estimation accuracy, and
- Relate this to safety margins in order to determine availability of the positioning estimates to safety-critical applications.
- Obtain the parameters to assess the positioning integrity functionality cellular via broadcast.
The GNSS integrity specification in Rel-17 also includes further GNSS correction error source characteristics and integrity decision attributes.
A general integrity framework has also been introduced, enabling an application to define integrity requirements in terms of IR, AL and TTA attributes. In Rel-17, this framework is only supported for GNSS positioning. The device-determined PL can also be reported as a key performance indicator to the network.
The GNSS integrity assistance data from the network to the mobile device includes warning flags for malfunctioning satellites and other feared events, as well as ‘do not use’ flags to indicate that information is not validated for integrity assessments (even if it may be good enough for positioning purposes). The network also informs the mobile device about the status of measurements obtained from the satellite – for example, if there are statistical uncertainties about the satellite orbit, clock or bias errors, as well as about ionospheric or tropospheric signal delays. Essentially, the SSR parameters in Figure 2 are complemented in Rel-17 with more detailed information about the statistical uncertainty.
Depending on the capabilities of the network and the mobile device, it is possible to support operation at different integrity levels. The positioning quality of service may determine how integrity attributes and threshold are set. Integrity levels can be defined for the overall positioning system including both the mobile device and the network. The levels can be determined, negotiated/requested or toggled either before or during positioning procedures.
3GPP high-precision GNSS trials and evaluations
Open, interoperable and scalable 3GPP representation and distribution are essential to enable a global mass-market ecosystem for high-precision GNSS. Many trials and evaluations have been completed or are ongoing, including three publicly funded research and evaluation projects that we would like to highlight:
- VINNOVA Network-RTK Positioning for Automated Driving (NPAD)
- Wallenberg Autonomous systems Research Arena, Public Safety (WARA-PS)
- VINNOVA Digital Infrastructure enabling accurate Positioning for Autonomous Systems (DINPAS).
NPAD, which ran from 2018 to 2020, focused on 3GPP GNSS OSR for automotive use cases, with different types of evaluations on public roads and in test areas such as AstaZero.

3GPP based GNSS positioning for automotive use cases
Download the final NPAD report here.
WARA-PS focuses on different aspects of coordinated public safety based on autonomous systems, where high-precision positioning is an enabler.
Watch a video of WARA-PS on their YouTube channel
DINPAS will evaluate 3GPP Rel-16 GNSS SSR in general as well as in specific use cases associated to future autonomous airports in terms of reliable, precise positioning to benefit the next generation of industrial digital solutions.
Next steps for GNSS positioning
Looking ahead to Rel-18, the work on integrity, mainly with a 5G positioning scope in mind, is set to continue in May 2022.
Our leading role in the work to standardize both positioning accuracy and positioning integrity in 3GPP has given us the opportunity to develop deep experience with different kinds of applications through extensive testing. As a result, we will be ready to introduce both OSR and SSR in our Ericsson Network Location product later this year, as soon as the final tests have been completed.
Explore more
To learn more about Ericsson’s work in the area of GNSS positioning, visit our Ericsson Network Location page.
Visit Ericsson Research’s future technologies page to learn more about our ongoing technology journeys.