Although many of the URLLC-related improvements are small in themselves, taken together they significantly enhance NR in the area of URLLC [11].
The inter-UE downlink (DL) preemption that is already supported in release 15 is extended in release 16 to include the UL, such that a UE’s previously scheduled lower-priority UL transmission can be preempted (that is, cancelled) by another UE’s higher-priority UL transmission. Release 16 also supports standardized handling of intra-EU UL resource conflicts.
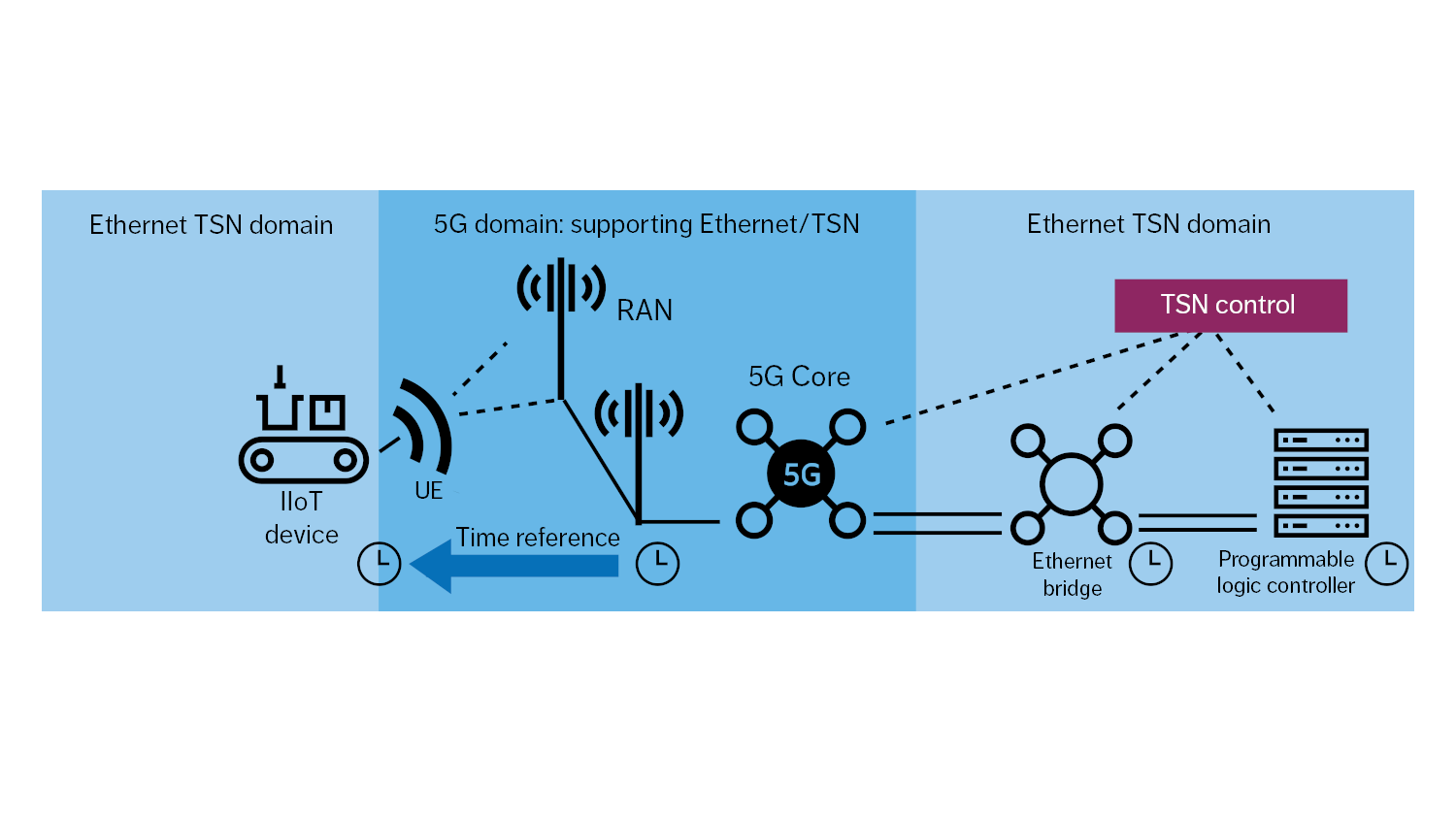
To reduce latency, release 16 supports more frequent control-channel monitoring. Furthermore, for both UL configured grant and DL semi-persistent scheduling, multiple configurations can be active imultaneously to support multiple services. These enhancements are especially useful in combination with TSN traffic, where the traffic pattern is known to the base station.
Intelligent transportation systems and vehicle-to-anything communications
ITS, which provide a range of transport and traffic-management services, are another major vertical focus area in release 16. Among other benefits, ITS solutions improve traffic safety as well as reducing traffic congestion, fuel consumption and environmental impacts. To facilitate ITS, communication is required not only between vehicles and the fixed infrastructure but also between vehicles. Currently, 25 use cases for advanced V2X communications have been defined, including vehicle platooning and cooperative communication using extended sensors [12].
In release 15, communication with fixed infrastructure is provided by the access-link interface between the base station and the UE. Release 16 adds the option of the NR sidelink (PC5), which can operate in in-coverage, out-of-coverage and partial-coverage scenarios, utilizing all NR frequency bands. It supports unicast, groupcast and broadcast communication, and hybrid automatic repeat request (hybrid-ARQ) retransmissions can be used for scenarios that require more robust communication. Groups can be either configured or formed, and the group members communicate using groupcast transmissions. A truck platoon, for example, could be configured using dedicated hybrid-ARQ signaling between the receivers and transmitter, or formed in a dynamic manner based on the distance between the transmitter and receiver(s).
Positioning
For many years, UE positioning has been accomplished with Global Navigation Satellite Systems assisted by cellular networks. This approach provides accurate positioning but is typically limited to outdoor areas with satellite visibility. There is currently a range of applications that requires accurate positioning not only outdoors but also indoors. Architecture-wise, NR positioning is based on the use of a location server, similar to LTE. The location server collects and distributes information related to positioning (UE capabilities, assistance data, measurements, position estimates and so on) to the other entities involved in the positioning procedures. A range of positioning methods, both DL-based and UL-based, are used separately or in combination to meet the accuracy requirements for different scenarios.
DL-based positioning is supported by providing a new reference signal called the positioning reference signal (PRS). Compared with LTE, the PRS has a more regular structure and a much larger bandwidth, which allows for a more precise correlation and time of arrival (ToA) estimation. The UE can then report the ToA difference for PRSs received from multiple distinct base stations, and the location server can use the reports to determine the position of the UE.
UL-based positioning is based on release 15 sounding reference signals (SRSs) with release 16 extensions. Based on the received SRSs, the base stations can measure and report (to the location server) the arrival time, the received power and the angle of arrival from which the position of the UE can be estimated. The time difference between DL reception and UL transmission can also be reported and used in round-trip time (RTT) based positioning schemes, where the distance between a base station and a UE can be determined based on the estimated RTT. By combining several such RTT measurements, involving different base stations, the position can be determined.