5G synchronization requirements and solutions
The need for synchronization in the RAN has grown as new radio technologies and network architectures emerge to boost efficiency and support demanding 5G use cases. Although the fundamental synchronization requirements have not become more stringent in 5G, the need for time synchronization has become much more critical.
Ericsson CTO Erik Ekudden’s view on the importance of synchronization in 5G
Network synchronization is key to optimal radio network performance. While there is no change to fundamental synchronization requirements in the move from 4G to 5G, wider use of TDD radio technology and growing demand for new network architectures that support demanding 5G use cases have made the need for time synchronization more critical in 5G. Industrial automation is just one example of a use case that requires accurate timing and is likely to generate additional synchronization requirements in the near future.
This Ericsson Technology Review article explains the main categories of 5G synchronization requirements and presents a toolbox of solutions for all relevant scenarios, the most challenging of which can often be addressed within the RAN domain.

The need for synchronization in the RAN has grown as new radio technologies and network architectures emerge to boost efficiency and support demanding 5G use cases. Although the fundamental synchronization requirements have not become more stringent in 5G, the need for time synchronization has become much more critical.
Accurate and reliable synchronization has long been a fundamental prerequisite for the correct operation of telecommunications networks. Its importance has grown in 4G, and it will be more important than ever in 5G and future networks.
RANs are designed to optimize service performance and reliability, and synchronization is a vital enabler. The RANs use different sources, often in combination, to provide synchronization characteristics to match the network use case and services delivered. Finding the right balance between timing accuracy, availability and cost is key to making services successful.
Many of the commercial 5G networks going live around the world today use TDD. TDD radio frames inherently require time and phase alignment between radio base stations, to prevent interferences and related loss of traffic. Time synchronization is also required in FDD networks when different radio coordination features are used.
New network architectures imply new approaches to addressing the various synchronization needs. This includes using Precision Time Protocol (PTP) and radio interface-based methods to synchronize distributed radio units in the evolved RAN architecture, where the upper and lower parts of the 5G New Radio (NR) RAN are separated in the different logical units: the centralized unit (CU), the distributed unit (DU) and the radio unit (RU). The baseband function in a base station is split into two logical units: a CU hosting the higher-layer protocols and a DU handling the lower layers to the user equipment (UE).
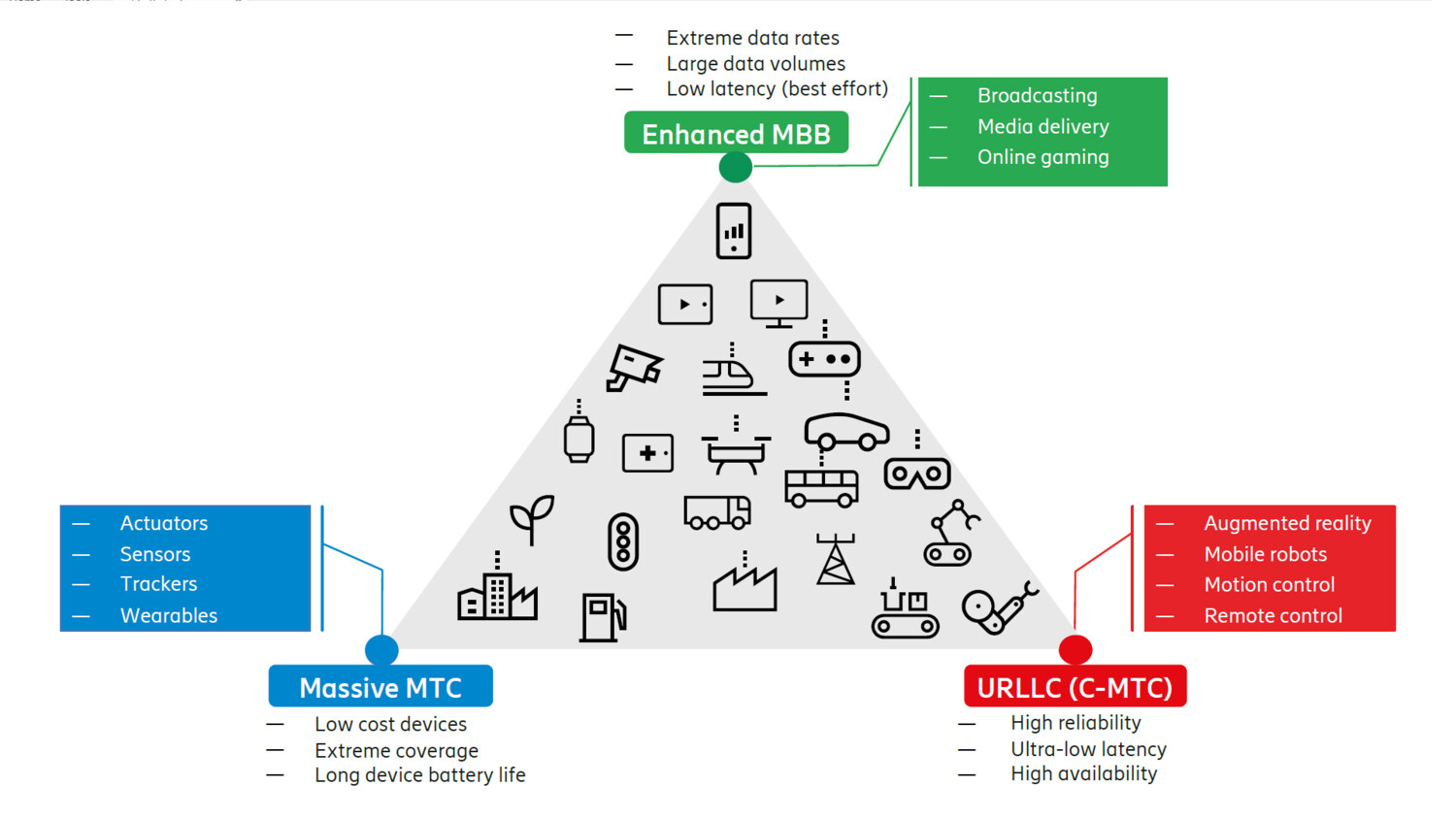
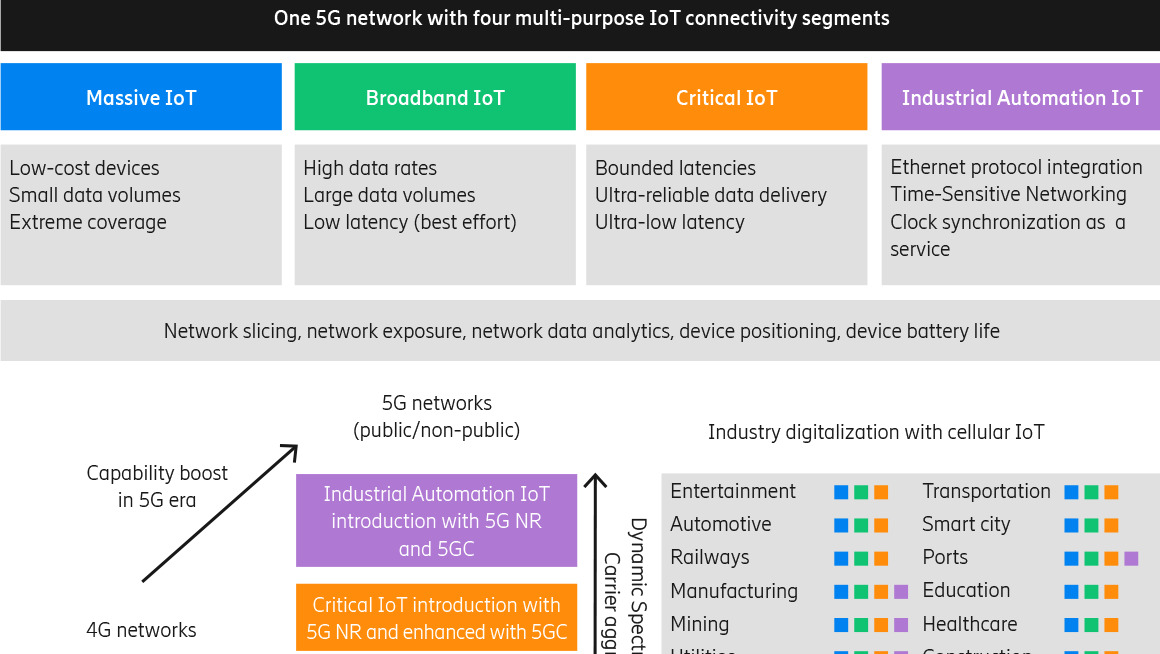
5G makes it possible to serve several applications that have previously been supported either by wireline or by non-standard radio technologies, such as Critical Internet of Things (IoT) and Industrial Automation IoT services [1] for which time synchronization is fundamental. While many applications benefit from accurate time synchronization, it is important to realize that high time accuracy over large areas can be very costly. Services with special accuracy or availability demands should be carefully analyzed to minimize costs.
Figure 1 provides some examples of synchronization in new network scenarios. Time and phase synchronization is particularly important in 5G networks.

Figure 1: Synchronization in new network scenarios
The two main types of synchronization requirements that are relevant for 5G networks are those that depend on the radio network operation and those that depend on the supported services (application-driven requirements).
Radio network-driven synchronization requirements
Synchronization requirements related to communication over the radio interface can be divided into two categories: TDD cell phase synchronization (Tsync) and communication features based on coordinated transmission or reception from multiple Transmission Reception Points (TRxPs).
TDD cell phase synchronization
TDD cells operating at the same frequency (or adjacent frequencies) in overlapping coverage areas require time domain isolation to prevent base-station-to-base- station and UE-to-UE radio frequency (RF) interference. There are two requirements for time domain isolation:
- the cells must use the same TDD configuration
- the deviation in frame start timing between cells must be below a maximum value specified as cell phase synchronization accuracy in the 3GPP.
For TDD synchronicity and interference, the critical points are when switching between transmission and reception, as shown in Figure 2. Guard periods are used for isolation with a configurable total guard time expressed as an integer number of symbols. The duration of the guard period needs to cater for four effects:
- air propagation time (Tprop)
- sufficient transient time when the transmitter changes between defined ON/OFF power levels (TOn Off, TOff On)
- sufficient time for the UE and base station to change between transmit and receive modes (TRX TX, TX TRX)
- allocate margin for cell phase synchronization errors (Tsync).
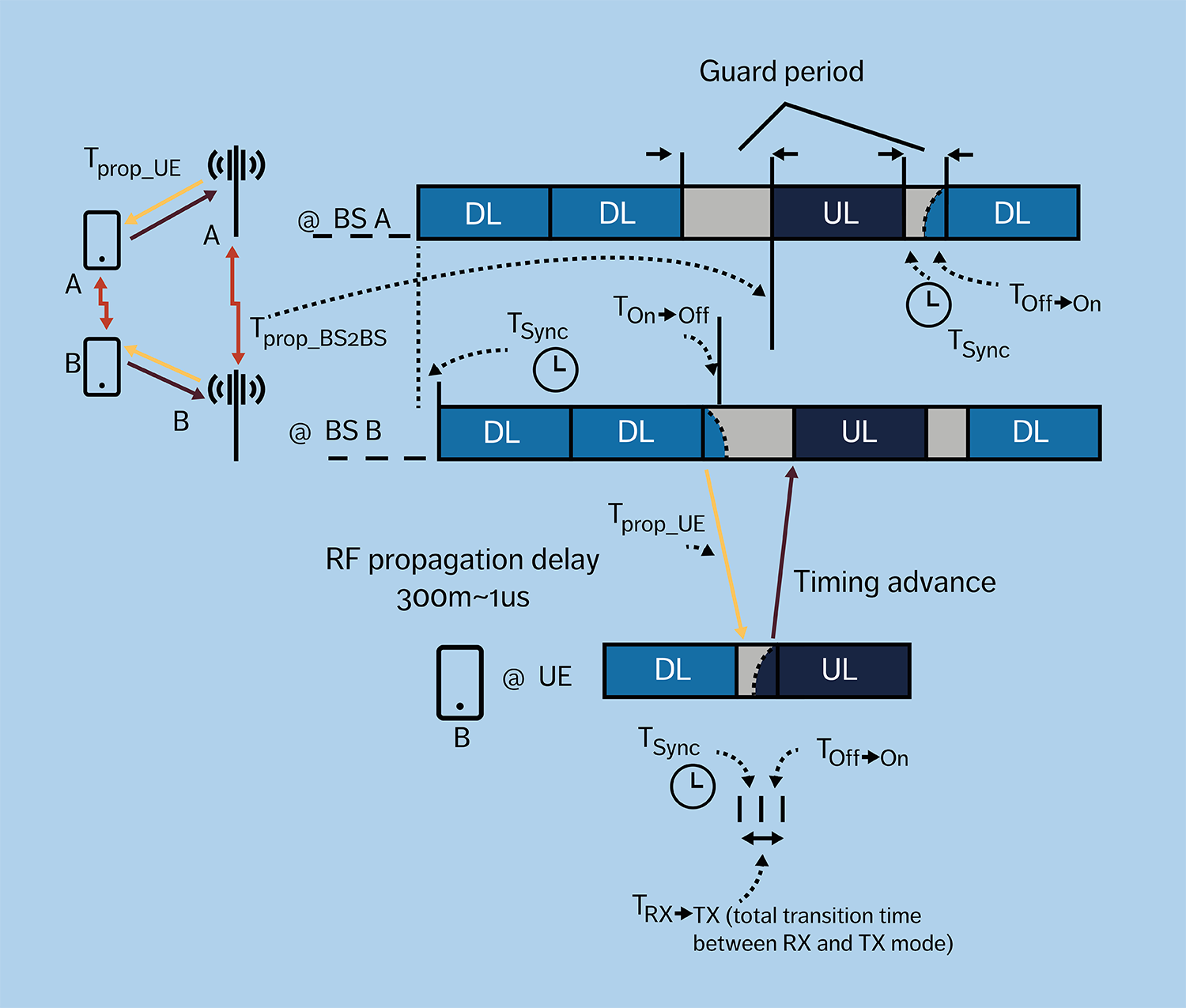
Figure 2: Synchronization for TDD
Since guard periods are not used for communication, they reduce the time ratio when spectrum resources can be used. To decrease overheads, the emphasis is on striving to keep the guard periods short, while still catering for the desired effects. Allocation of a budget to the different components of the guard period is the result of a trade-off between cost (product and deployment), availability, TDD periodicity and overheads.
In 3GPP New Radio (NR), cell phase synchronization is specified as 3µs [2] – that is, the same as for LTE. This is because the reduced transient times in NR made it possible to keep the same synchronization requirement with low overhead.
The requirement on cell phase synchronization is ultimately specified in terms of maximum deviation in relation to a common absolute timing requirement and dividing the requirement by half (±1.5µs, for example). This allows a design with independent synchronization references.
In cases where the TDD-unicast area is not isolated, the 3GPP has specified that traceability to a standard timing reference (UTC) is required [3]. This prevents interference between different networks using adjacent frequency bands or between national borders, because it enables the phase alignment of the radio frames generated by different networks with overlapping areas.
UTC traceability does not imply that UTC time is recovered or that leap seconds are used; in fact, the 3GPP also requires the use of continuous time without leap seconds. In practice, a base station with a Global Navigation Satellite System (GNSS) receiver fulfils the requirement on UTC traceability as specified by the 3GPP. The ITU-T (International Telecommunication Union Telecommunication Standardization Sector) specification of the primary reference time clock (PRTC) includes the possibility for the PRTC to be synchronized with GNSS. This means that a PTP-based solution can also fulfill this requirement.
Communication features based on coordinated transmission or reception from multiple Transmission Reception Points
A variety of features that benefit from coordinated transmission or receptions from multiple TRxPs have been standardized over the years, all with different purposes and characteristics. Some relate to combining spectrum assets, thereby allowing total higher aggregated bandwidth and throughput (carrier aggregation, dual connectivity and so on), while others relate to improving link performance at the cell edge (variants of coordinated multi-point operation, for example). Still others relate to specific services like Multimedia Broadcast Multicast Service over a Single Frequency Network. Coordination may also occur between NR and LTE.
These features and related timing requirements are applicable within a single operator network, and as a result, control of relative time error between antennas used by the feature is sufficient. What matters is the relative frame timing alignment at the receiver. The 3GPP has therefore defined a maximum receive timing difference (MRTD) as a maximum relative receive timing difference the UE must be capable of handling. The MRTD consists of a base-station relative time alignment error (TAE) and an RF propagation delay difference (∆Tprop). That is, MRTD = TAE + ∆Tprop.
Based on the level of required MRTD, three main categories could be identified:
- MRTD as a fraction of a cyclic prefix (CP)
- MRTD without CP relation
- no timing requirement.
In the case of MRTD as a fraction of the CP, the remaining duration of the CP allows for channel delay spread. In 3GPP TS 38.104 [10], the TAE ranges between 65ns to 260ns depending on the feature and on the CP duration but is only valid for colocated/ intra-site deployments where ∆Tprop~0. The strict MRTD, and thereby TAE, relates to features using the same frequencies (like MIMO (multiple-input, multiple-output)) or at adjacent spectrum (like contiguous carrier aggregation) where common or shared functions in the RF chain could cause strict timing dependencies.
Even if features in this category can be served from distributed TRxPs (where generally ∆Tprop≠ 0) – that is, not being restricted to a colocated/inter-site deployment scenario – it would be difficult to specify and mandate a single fixed TAE. Rather, the required TAE would depend on actual deployment, its RF characteristics and the UEs’ relative position between the TRxPs, as shown in Figure 3.

Figure 3: Synchronization for coordinated transmission/reception
As noted in the bottom of the figure, ∆Tprop_UE1 and ∆Tprop_UE4 are less than ∆Tprop_UE2, which is less than ∆Tprop_UE3. For the same delay spread, UE1 and UE4 can tolerate larger TAE than UE2 and UE3. For colocated D and E, the TAE of D-E is generally less than the TAE of A-B.
In contrast, features in the “MRTD without CP relation” category allow a relatively large part for ∆Tprop and thereby more flexible deployments, such as heterogeneous networks. For example, synchronous dual connectivity allows an MRTD of up to 33µs, of which 30µs can be allocated for ∆Tprop and the remaining 3µs for TAE.
3GPP-defined asynchronous dual connectivity without TAE requirements and ∆Tprop restrictions is an example of a feature with no timing requirement.
Application-driven synchronization requirements
While the introduction of 5G did not cause any fundamental change to radio network synchronization requirements, some applications may put more stringent local accuracy requirements on the synchronization of the 5G nodes. Examples include time-sensitive networks (TSNs), smart grid applications and the UE device-positioning use case.
Time-sensitive networks
TSNs in industrial applications generally require the distribution of time synchronization to the industrial subnetworks used for functionality such as robot control or autonomous vehicles. This results in synchronization requirements in the microsecond range between nodes in the TSN.
The 3GPP technical specification TS 23.501 [4] presents an architecture and methods that enable the successful integration of a 5G network into a TSN synchronization network. Industrial automation scenarios often involve multiple timing domains. The recommended solution is to relay timing transparently across the 5G network, where the delay of the TSN-time messages through the 5G network is measured and compensated. The same architecture can also be used to support the industrial application by distributing the timing of the 5G network to the TSN [5].
Smart grid applications
When 5G is used to support smart grid applications, the 3GPP synchronization architecture [4] can be used to support the distribution of timing to the synchro-phasors that in this way can measure the phase relationships in the AC power distribution network. These applications require synchronization accuracy in the same range as the TSN. In this case, the distribution of a single time reference is sufficient.
Positioning of UE devices
Some approaches to solving the UE device-positioning use case rely on accurate synchronization of the radio nodes with the help of methods such as OTDOA (Observed Time Difference of Arrival). Depending on the required positioning accuracy, these may not always result in cost-efficient solutions. For example, 1m corresponds to a synchronization accuracy of around 3ns, which is orders of magnitude more stringent than other radio network synchronization requirements. A method that depends on such a high level of synchronization accuracy would significantly increase the cost of the solution, especially when synchronization to the base stations is distributed over the network. Over-the-air synchronization (OAS) methods provide an attractive synchronization alternative in this case.
Evolving network synchronization standards and technologies
Most of the relevant synchronization requirements are defined by the 3GPP. The fundamental technologies to address these requirements come from the GNSS, which provides the basic technology for a time synchronization master, enabling global distribution of a UTC-traceable reference. GNSS services include GPS, BDS (the BeiDou Navigation Satellite System) and Galileo [6], and are offered by several space agencies. GNSS is based on satellites having a known time and orbit position, transmitting messages whose arrival are measured by the GNSS receiver. GNSS satellites visibility is important for proper operation.
Specified by IEEE 1588, PTP has been selected by the telecom industry to distribute accurate time synchronization from an accurate master, such as GNSS. The basic concept is to distribute time synchronization from the PTP “grandmaster” to the leaf PTP clocks, using PTP messages. The protocol is based on a two-way exchange of timing messages [7]. This message exchange enables the distribution of the time from the PTP grandmaster and estimates the path delay. The path delay estimation assumes that the delay of the two transmission directions is symmetric. This is not always the case in real networks due to factors such as different fiber length or the use of different wavelengths in the optical transmission. Since any source of asymmetry results in error in the time synchronization distribution, the asymmetry must either be known and compensated for or sufficiently small to be negligible.
To limit the effects of asymmetry and packet delay variation that could be created by the network nodes (switches and routers, for example), IEEE 1588 has specified the “boundary clock” and “transparent clock” functions with event message timestamping in the hardware layer.
The distribution of time-phase and frequency synchronization has been addressed in several ITU-T recommendations [8]. In particular, these recommendations define reference synchronization networks, where the synchronization is generated by time synchronization masters or PRTCs, which are typically based on GNSS technology and where the reference timing signal is carried across a network of clocks. Frequency synchronization in these reference networks is carried over the physical layer (typically using synchronous Ethernet). The time synchronization reference is carried through a PTP, where the PRTC is the source of time for the PTP Grandmaster, also known as the Telecom Grandmaster (T-GM).
Two PTP profiles have been defined for the use of PTP in telecom – G.8275.1 (PTP with full timing support from the network) and G.8275.2 (PTP with partial timing support from the network) [8]. The purpose of the G.8275.1 profile is to meet the highest accuracy, which requires the implementation of an IEEE 1588 telecom boundary clock or telecom transparent clock in every node in the timing distribution network. Assisted partial timing support (APTS), which concerns the use of PTP as a backup for GNSS, is an important implementation of the G.8275.2 profile.
To meet the TDD “relative” synchronization requirement that cell phase synchronization must be better than 3µs, the accuracy of the time synchronization reference at the input to the base station must always be better than ±1.1µs when measured against a standard time reference. A margin of 400ns is left to the end application to fulfill ± 1.5µs on the radio interface. Synchronization methodologies and architectures applicable to a switched fronthaul have also been covered in G.8271.1 [8].
The synchronization aspects of fronthaul networks are also addressed by the O-RAN Alliance. In particular, one of the groups in O-RAN addresses the split between the DU and RU – O-DU and O-RU in the O-RAN terminology. The split option is denominated as 7-2x and it is an intra-PHY split – that is, some parts of the 3GPP PHY layer are implemented in the DU and others in the RU [9].
To address the synchronization needs in these scenarios, the O-RAN specification defines different synchronization topologies. The DU may be part of the synchronization chain or just a consumer of the synchronization. The RU is the main user of synchronization and it may also be synchronized by a timing reference generated directly at the radio site. The data carried between a DU and an RU uses Ethernet-based transport. The time and frequency synchronization distribution can be achieved using a combination of PTP and synchronous Ethernet. There are no specific synchronization requirements for the CU.
Recommended synchronization solutions for evolving mobile networks
We have compiled a comprehensive toolbox of synchronization techniques that can be used to provide appropriate frequency synchronization and time alignment of the radio network with minimal disruption. Some of them are implemented in the RAN domain, while others are implemented in the transport domain. In many cases, a combination of techniques in both domains will be required to create a robust and reliable solution.
RAN-based synchronization solutions
A solution is considered to be RAN based if it can fulfill the synchronization requirements of the RAN network without synchronization support from the transport network. The two main RAN-based solutions are GNSS-based synchronization and over-the-air synchronization (OAS).
A GNSS-based solution installed directly at base station sites can provide cost-efficient, accurate and predictable time synchronization of the radio network without any support from the transport network. The higher accuracy of GNSS compared with other synchronization sources allows for comparatively longer holdover periods. Moreover, the time error can be better estimated during holdover, making it possible to take consequent actions per service (TDD, for example).
Short disruptions due to interference and blocking are common, but the negative impact can be avoided or limited by the base station’s holdover using the local oscillator – up to a few hours for a TDD base station, for example. Longer holdover periods can be achieved when GNSS is combined with other technologies that provide a stable timing reference (traceable to PRTC). One promising method for time alignment of the radio network is to use information over the NR air interface. OAS uses timing information sent over the radio interface between neighboring base stations. Features requiring stricter synchronization are generally implemented between neighboring base stations. OAS is based on round-trip time measurement similar to PTP, with the advantage that the asymmetries are generally small over the air, making it possible to achieve good time alignment.
Transport-based synchronization solutions
Transport-based solutions, in which synchronization is distributed over the transport network, rely on two key technologies: frequency synchronization over the physical layer (synchronous Ethernet) and frequency and time synchronization over the packet layer (PTP).
Frequency synchronization based on packet protocols like Network Time Protocol (NTP) or PTP using the G.8265.1 profile (in a PTP-unaware network) has proven to be the most cost-efficient solution in LTE-FDD networks, where frequency synchronization alone was often sufficient. In 5G networks the situation is different because time and phase synchronization is more often needed compared with previous generations of radio networks, due to factors such as wider use of TDD or the need for coordination between NR and LTE.
In these cases, the delay asymmetries and packet delay variation present in PTP-unaware networks would make it impossible to meet the stringent accuracy and stability requirements. To mitigate such effects, the transport network requires PTP-aware network elements such as boundary clocks or transparent clocks as well as support of PTP across the entire time distribution chain (“full timing support from the network” as described in G.8275.1). An important aspect of this is that a base station may use PTP for the delivery of both time synchronization and frequency synchronization.
Distributing time synchronization over the same transport network infrastructure used for user data has the benefits of providing the same level of robustness and redundancy for timing as for the user traffic itself. Another important aspect of the PTP network planning is time error budget planning, which depends on the dimension of the network and the accuracy of the PTP-aware network elements. There are guidelines for this in G.8271.1 [8].
Combining techniques for best results
Several aspects need to be considered when selecting the most appropriate synchronization solution(s), including installation and operation costs, synchronization accuracy, robustness and availability targets. The optimal solution for a specific network may depend on existing synchronization feature support of the network and network elements, transport network modernization plans that improve synchronization support, as well as operator preferences. Possible future regulations of national authorities may also be relevant.
In many cases, synchronization in a mobile network will benefit from the implementation of a combination of methods. As shown in Figure 4, a fairly typical 5G mobile network can combine methods like GNSS and OAS at base station sites, time and frequency distribution via the transport network, and redundancy and holdover functions in the nodes. This is particularly relevant for cases that require GNSS redundancy (to protect against jamming or spoofing events, for example), where the distribution of timing over the transport network as a complement to a local GNSS receiver should be considered.

Figure 4: Recommended synchronization solutions
PTP with “full timing support from the network” should be used to meet the relevant time synchronization requirements. Redundancy is achieved through a PTP network that is fed from geographically redundant T-GMs and distributes timing over the same physically redundant topologies that are used for user traffic. The best control over the synchronization network architecture will be achieved by rolling out PTP from the lower part of the transport network, with GNSS receivers and T-GM functionality in base stations or routers, and be extended to include T-GMs that are higher up in the network when feasible.
In parts of the network where transport does not support PTP, PTP should not be used as the primary time source for RAN nodes due to the limitations on the achievable performance. In these cases, it should only be used as an assisting reference in APTS mode for GNSS. In these parts of the network, OAS provides an alternative solution for synchronizing the radio nodes without requiring the support of a transport network.
When the GNSS reference is lost, the holdover time can be prolonged by using assisting synchronization sources such as APTS, OAS and PRTC/enhanced PRTC traceable synchronous Ethernet. The time period a clock can remain within the required accuracy depends on the stability of the assisting source.
Conclusion
Proper network synchronization is a prerequisite to excellent radio network performance. Some of the most compelling use cases for 5G, including industrial automation, depend on more accurate timing and will likely generate additional synchronization requirements in the near future. While the level of the required synchronization accuracy depends on several factors, it would be a mistake to apply the tightest synchronization requirement as a general 5G requirement, as doing so would make the cost for 5G and the future evolution of the mobile technologies unsustainable. The tightest requirements should be addressed locally only when and where required.
An efficient synchronization solution that addresses all relevant scenarios requires the support of a toolbox of synchronization methods that are implemented in the RAN domain (GNSS and OAS), the transport domain (such as PTP), or both. For many features, what matters more than anything else is the relative time error between neighboring base stations. In this context, over-the-air synchronization (OAS) is a powerful tool.
References
- Ericsson Technology Review, Critical IoT connectivity: Ideal for time-critical communications, June 2, 2020, Alriksson, F; Boström, L; Sachs, J; Wang, Y.-P. E; Zaidi, Ali
- 3GPP technical specification TS 38.133, NR; Requirements for support of radio resource management
- 3GPP technical specification TS 38.401, NG-RAN; Architecture Description
- 3GPP technical specification TS 23.501, System architecture for the 5G System (5GS)
- Ericsson Technology Review, 5G-TSN integration meets networking requirements for industrial automation, August 27, 2019, Farkas, J; Varga, B; Miklós, G; Sachs, J
- ITU Technical Report TP-GSTR-GNSS – Considerations on the use of GNSS as a primary time reference in telecommunications, 2020
- IEEE 1588-2019 – IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems, June 16, 2020
- ITU-T Recommendations G.826x and G.827x series (G.8200-G.8299: Synchronization, quality and availability targets
- 3GPP technical specification TR 38.801, Technical Specification Group Radio Access Network; Study on new radio access technology: Radio access architecture and interfaces
- 3GPP technical specification TS 38.104, NR; Base Station (BS) radio transmission and reception